封面图源 https://www.eet-china.com/mp/a363612.html ↗
图的定义#
- 有向图:点和弧。弧:尖括号+两个点
- 无向图:点和边。边:圆括号+两个点,相当于两个方向的弧重在一起
- 点和顶点是一个东西
图的基本假设:不考虑自环、不考虑平行边(即完全一致的两条线。注意对于有向图,一个 a 到 b 一个 b 到 a,这不叫平行边,因为这是两条不同的线。如果是无向图则是平行边)
弧或边带权的图称为网,有向网或无向网
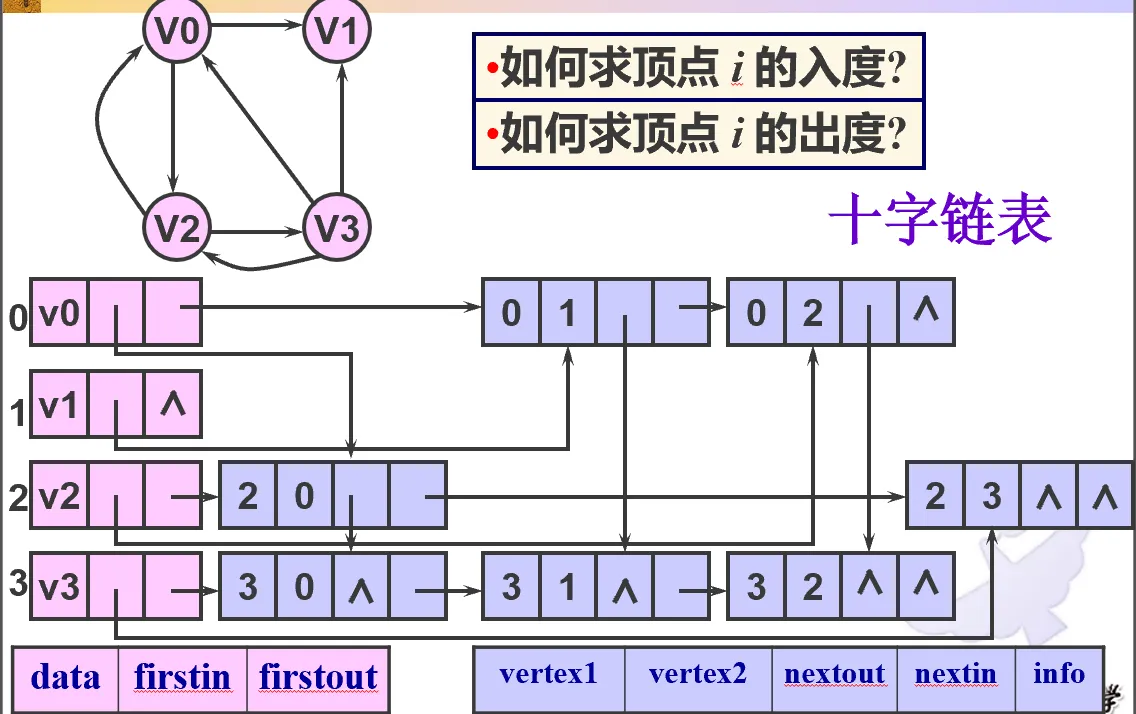
若两个点之间有一条边或弧,则称这两个点为邻接点,并称这条边与这两个顶点相关联。与某个点相关联的边的数目称为顶点的度。在有向图中,根据边是 to 这个点还是 from 这个点,进一步细分为入度和出度。
曰(握手原理):对于无向图,所有点的度数之和等于边数的二倍;对于有向图,出度之和等于入度之和
子图:从图的边集和点集中抽一些构成的一个新图
对于一个有 顶点的图
- 含有 条边的无向图称为完全图,即任意两个点之间都有边
- 含有 条弧的有向图称为完全图,即任意两个点之间都有双向边
- 若边数 则称为稀疏图,否则称为稠密图
路径。路径上边的数目称为路径长度。简单路径:顶点不重复。简单回路:第一个顶点和最后一个顶点相同的简单路径
- 连通图:任意两个点之间存在路径相同
- 对于非连通图,各个极大连通子图称为这个图的连通分量
- 对于有向图,若任意两个顶点之间存在一条有向路径,则成为强连通图
- 非强连通图也有各个极大强连通子图,称为强连通分量
图的存储#
邻接矩阵#
无向图的邻接矩阵是对称阵,有边就是 1,没边就是 0(没有自环,所以自己和自己之间是 0)。求顶点的度,就是求对应行的和。打印图的时间复杂度 。firstneighbor 就是从左往右扫第一个非零的,
有向图的邻接矩阵非对称,左边竖着排的 to 上面横着排的,能到就是 1,不能到就是 0。求顶点的出度,即求横行和;求顶点的出度,即求纵列和
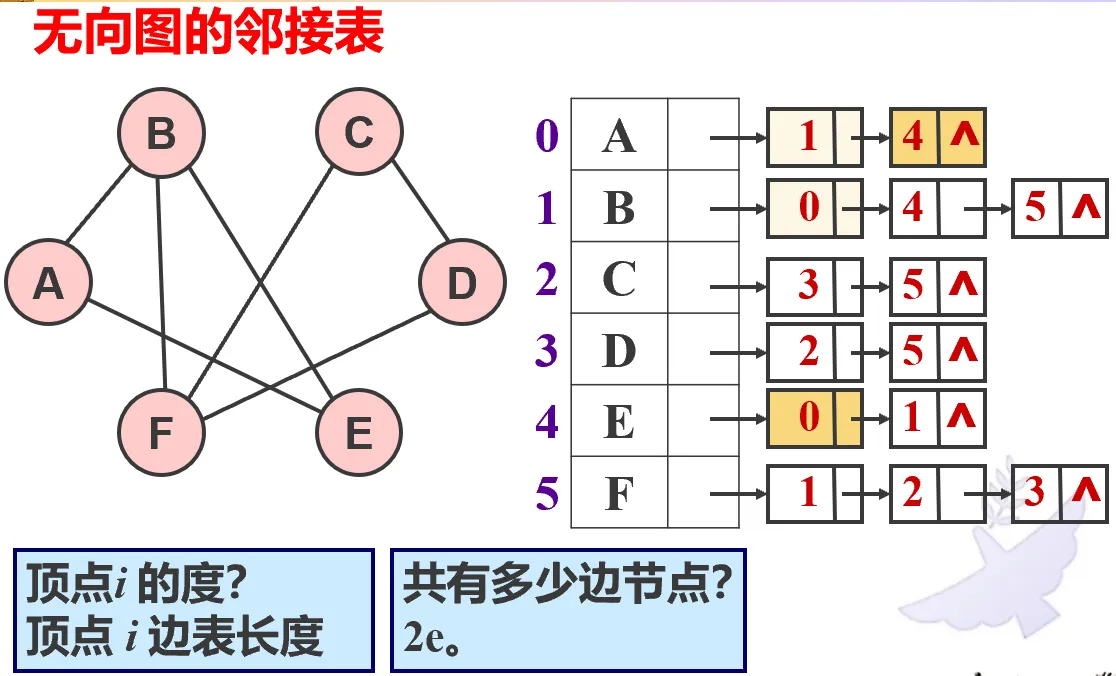
邻接表#
把邻接点串在一起放在数组里。适合稀疏图。
无向图。求 firstneighbor ,nextneighbor ,打印图
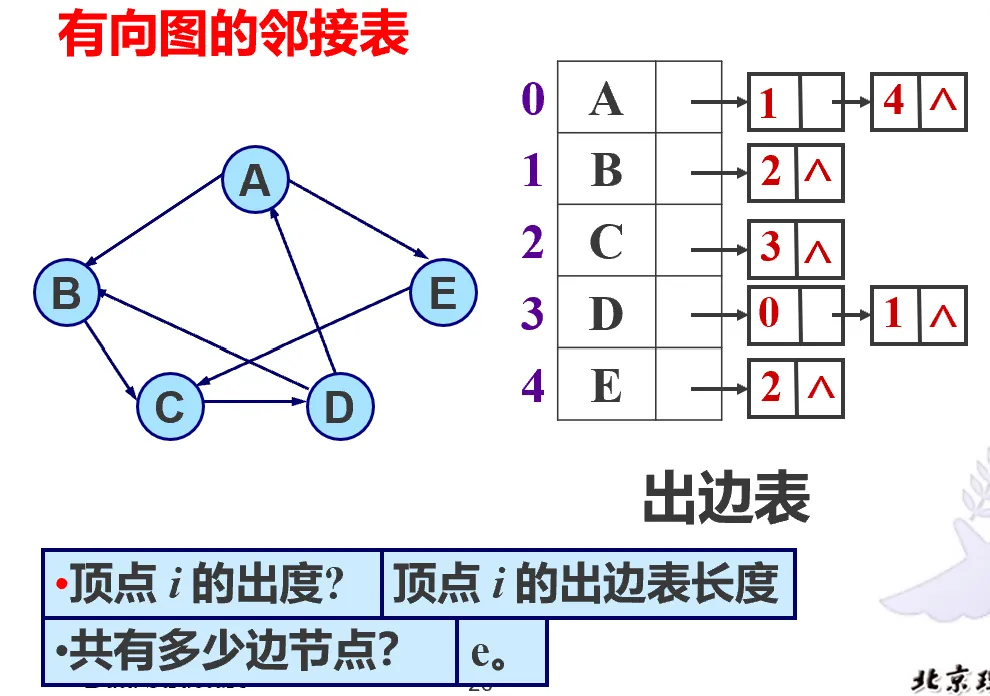
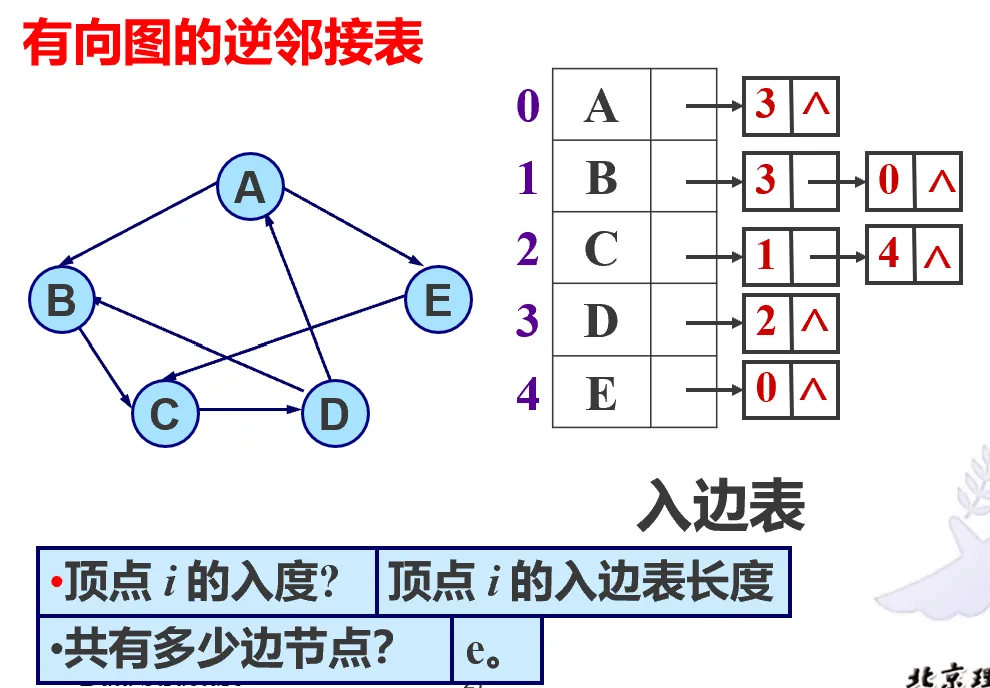
有向图,分为出边表和入边表
邻接多重表#
有向图的邻接多重表(十字链表),不仅有点结构(vbox,粉色)还有边结构(ebox,紫色)
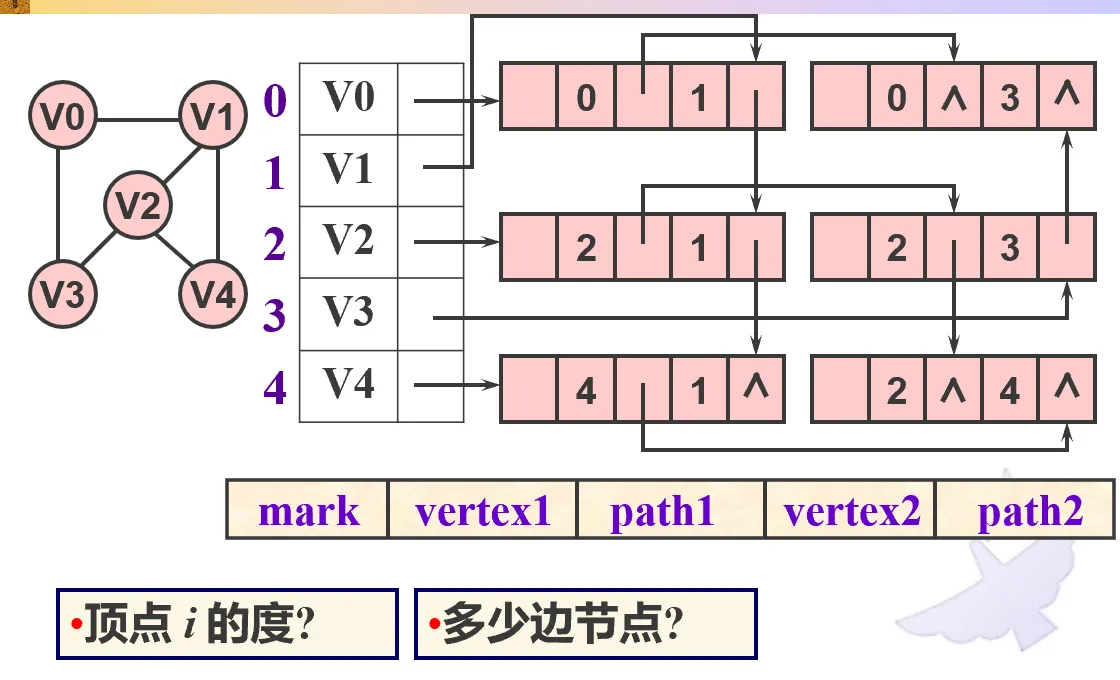
无向图的邻接多重表。path1 即与 vertex1 关联的下一条边,path2 即与 vertex2 关联的下一条边。顶点的度,就是沿着 path1 有多少个边结点。整个图一共 e 个边结点。
图的遍历#
深度优先搜索#
深度优先搜索 (Depth First Search, DFS):一直往下走,走不通回头,换条路再走,直到无路可走。
选择一个起始点 u 作为当前结点,执行如下操作:
- 访问当前结点,并且标记该结点已被访问,然后跳转到第二步
- 如果存在一个和当前结点相邻并且尚未被访问的结点 v,则将 v 设为当前结点,继续执行第一步
- 如果不存在这样的 v,则进行回溯,回溯的过程就是回退当前结点
这就是一个递归过程,生成了一棵树,称为深度优先生成树 (DFS Tree)
bool visited[MAXVNUM];
void DFS(Graph G,int v)//v是结点编号
{
visit(v);//访问当前结点
visited[v]=true;
w=firstneighbor(G,v);
while(w!=-1)
{
if(visited[w]==false) DFS(G,w);//没访问过就从这个邻接点开始DFS
w=nextneighbor(G,v,w);
}
}
void DFStraverse(Graph G)//入口
{
for(int v=0;v<G.vnum;v++) visited[v]=false;//visited数组清空
for(int v=0;v<G.vnum;v++)
{
if(visited[v]==false)
DFS(G,v);//没见过的点就做一遍DFS
}
}广度优先搜索#
广度优先搜索 (Breadth First Search, BFS):每访问一个点,就把他所有没访问过的邻接点入队,然后当前点出队,访问队首。广搜得到的路径是不带边权的最短路。
bool visited[MAXVNUM];
void BFS(Graph G,int v)
{
queue<int> q;
visit(v);
visited[v]=true;
q.push(v);
while(q.empty()==false)
{
u=q.front();
q.pop();
w=firstneighbor(G,u);
while(w!=-1)
{
if(visited[w]==false)//如果没见过,那就见一下
{
visit(w);
visited[w]=true;
q.push(w);
}
w=nextneighbor(G,v,w);
}
}
}
void BFStraverse(Graph G)//入口
{
for(int v=0;v<G.vnum;v++) visited[v]=false;//visited数组清空
for(int v=0;v<G.vnum;v++)
{
if(visited[v]==false)
BFS(G,v);//没见过的点就做一遍BFS
}
}深搜广搜的复杂度是一样的,因为相当于每一条边都要走一遍,和打印的时间复杂度是一样的
- 用邻接矩阵存,
- 用邻接表存,
最小生成树#
- 称一张无向图是连通的,如果任意两个顶点之间存在通路。
- 称一个没有回路的连通图为一棵树
- 生成树是连通图的子图,它含有连通图中的全部 个顶点,有且仅有足以构成一棵树的 条边。因为既然要连通,那么每多一条边就意味着多一个点,如果存在环的话,多一条边并不会对连通起来的点数有贡献
- 最小生成树 (Mini Span Tree),即所有生成树中边权和最小的生成树。或者说,找到一个方案,用最小的花费连通所有点。
一个典型的例子: 个城市之间要铺设光缆,使得任意两个城市之间都存在通信的链路。已知各个城市之间铺设光缆的费用,求使得总费用最低的铺设方案
最小生成树有 Prim 算法和 Kruskal 算法。本质是贪心
Prim 算法(加点法)#
- 用一个集合存储访问过的点。选一个起始点,考虑它的所有邻边,选边权最小的邻边。将这个邻边连接的点加入集合。
- 现在这个集合里有两个点,把这两个点的所有邻边都考虑进来,选边权最小的邻边。检查这个邻边连接的点,如果连接的点没见过,那么将这个点加入集合,并选取这条边;如果见过了,那就顺延下去选边权第二小的,类推。
- 重复第二步直到所有顶点都加入集合。此时选择的邻边以及它们连通的顶点就构成了最小生成树
时间复杂度:,与边数无关,适用于稠密图
//采用邻接矩阵存图
int nearvex[MAXVNUM];//在最小生成树上、离i号点最近的那个点的编号
int lowcost[MAXVNUM];//i号点到刚才那个最近点的边权,-1表示已经在生成树中了
void prim(Graph G,int u)
{
for(int j=0;j<G.vnum;j++)//初始化
{
lowcost[j]=G.edge[u][j];
nearvex[j]=u;
}
lowcost[u]=-1;
for(int i=0;i<G.vnum-1;i++)//依次向生成树上添加n-1个顶点(加上起点就是n个了)
{
v=min_index(lowcost);//在非-1的数当中找最小值,返回对应邻接点的编号
lowcost[v]=-1;
for(int j=0;j<G.vnum;j++)//修改其他顶点的最小边
{
if(lowcost[j]>G.edge[u][j])
{
lowcost[j]=G.edge[v][j];
nearvex[j]=v;
}
}
}
}Kruskal 算法(加边法)#
- 从整个连通图中最小的一条边开始做。不断往子图上加边,能用最小的边的就用,只要不成环就行。直到加了 n-1 条边,这棵树就出来了。合并操作、判断成环,用的是并查集。
复杂度:选最小边用小根堆做,建堆 ,筛选复杂度 ,所以总的复杂度 。
两种都是贪心,但策略不同。Kruskal 从整个图的所有边进行贪心,所以适用于稀疏图。Prim 则无所谓。在贪心过程中,可能遇到存在两个最小边权的情况,这时候选哪个都可以,也就是说最小生成树不唯一。但是边权和一定是唯一的。
并查集#
并查集是数据结构。其上有两个最基本的操作:并,即连接两个元素void connect(a,b);查,即判断两个元素之间是否存在通路bool pd(a,b)
我们只需要知道两个元素之间是否存在通路,不关心它们之间到底是怎么连在一起的。所以,使用传统的存图方式显然不合适(那种是 的)。我们换一种存储方式,只关心元素的集合方式:
- 一开始每一个元素都是一个独立的集合,一旦连接一个集合中的某个元素与另一个集合的某个元素之间,我就把这两个集合揉在一起,表示这两个孤岛被联络起来了。
- 判断函数即判断两个元素是否属于同一个集合。
现在问题转化为:如何记录元素的集合关系。
尝试:使用一个一维数组来记录元素所属的集合。将元素进行编码,id[i]即存储编码为 i 的节点所属集合的编号。这样判断是否属于一个集合,只需要判断它们的 id 是不是一样的。但是这也有问题,就是连接两个集合的时候,要对涉及连接的每一个元素的 id 都进行修改。这是一个 的操作,显然不合适。现在问题转化为:如何实现只改变一个值
尝试:我们不记录元素的所属的集合,而记录元素的父节点。举个例子。对于下面这个集合组,我们可以写出 parent 数组:(-1 表示没跌)
| parent | -1 | 0 | 1 | -1 | 0 | 3 | -1 |
|---|---|---|---|---|---|---|---|
| 元素编码 | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
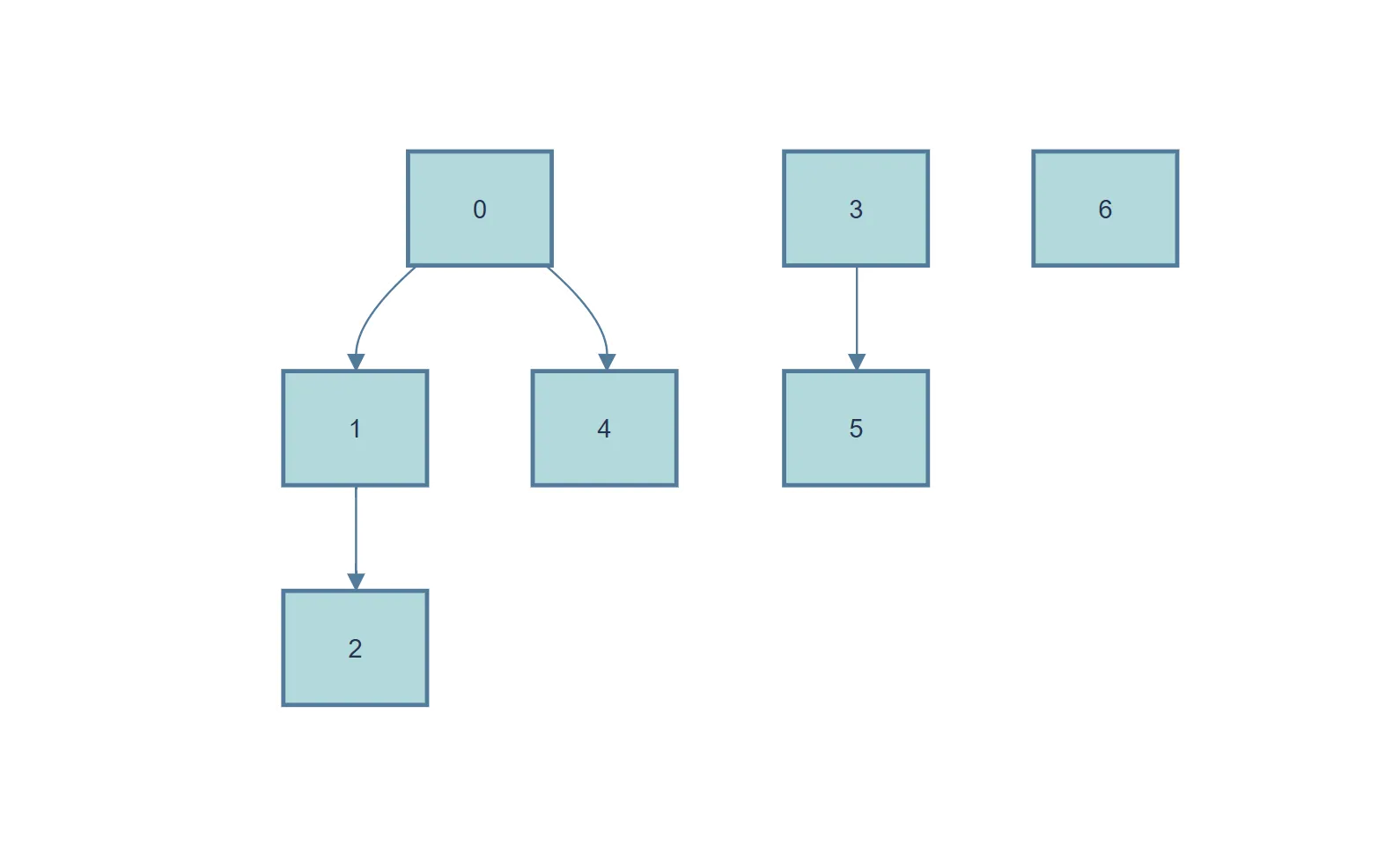
执行connect(5,2),相当于把 5 的根(3)和 2 的根(0)连起来。这样只需要把 3 的 parent 改成 0 就行了。但是这也有问题,这样的连接实际上是一个建树的过程。当这棵树高度很大的时候,爬树找根的过程很慢(考虑极端情况:单支树)。我们应当让生成的树的高度尽可能小。现在问题转化为:如何让生成的树不偏
对于刚才这个例子,考虑:把 3 连到 0 上,最终的高度为 2;把 0 连到 3 上,最终高度为 3。可以看出,把小树连到大树上,可以使得最终的高度小一些。至于如何量化一棵树的大小,可以使用树中元素数量,也可以用树的高度,两个都可以使得生成树尽可能平衡。
因此对策就出来了:保留 parent 数组,只不过作出如下修改:原本我们用 -1 表示根节点,现在还用负数,但负越多代表树越大。例如刚才的例子,如果用元素个数衡量树的大小,那么parent[0]=-4、parent[3]=-2,代表 0 这棵树大小为 4,3 这棵树大小为 2,因此把 3 连到 0 上。采用这种规则建树,最坏情况是 ,够用了。
还能凹。建立一个备忘录,在执行pd函数遍历的过程中,直接把元素的父节点设到根上,这样路径上的每一个节点深度都是 1。这称为路径压缩(Path Compression)。这个算法可以把复杂度降低到几乎常数时间。
最短路#
Dijkstra#
只能做非负边权(注意非负边权包括 0)。可以求单源点到任意点的最短路。本质是广搜+贪心。
- Dijkstra 是一个从起点开始按边数往外扩展最短路径的过程。设一个点列(有序),一开始里面什么都没有。设一个数组 dist,记录起始点到每一个点的最少花费。
- 从起点开始,走一步,有的点能一步到达,有的点到不了。对于那些可以到达的点,dist 数组内则记录这一步的花费;对于那些到不了的点,花费记为无穷大。根据 dist 数组,选择花费最少的那个点加入点列。这就是到第一个点的最短路径
- 现在这个点列里面新增了一个点,我们看看利用这个点能不能使得起点到其他点的距离更短,如果短则更新,如果比原来还长(或者到不了别的点、距离为无穷大)就别更新,保持原来的长度。这时候再根据 dist 数组,选择花费最少的那个点加入点列。这就是到第二个点的最短路径
- 重复,得到第三个点的最短路径、第四个点……
这是 的。但是求任意两个点之间的话他做不了,当然你可以对每个点都做一次 Dijkstra,那样就是 ,也好不到哪里去
模板
void dijkstra(Graph &G,int v,int dist[],int path[])//v起点
{
int s[MAXVNUM];//最短路的顶点集(用子集序列表示)
n=G.vnum;
//初始化---------------------------------
for(int i-0;i<n;i++)
{
dist[i]=G.edge[v][i];
s[i]=0;
if(dist[i]<INF) path[i]=v;
else path[i]=-1;
}
path[v]=v;//将顶点v加入最短路路径
s[v]=1;//顶点进入最短路顶点集
dist[v]=0;//没有自环
//--------------------------------------
for(int i=0;i<n-1;i++)//求到其他点的最短路径
{
int u=min_index(dist);//找dist中最小值的编号
s[u]=1;//把他加入最短路的顶点集
for(int k=0;k<n;k++)
{
if(s[k]==0 && dist[u]+G.edge[u][k]<dist[k])
{//顶点没见过,并且比原来的记录小,可以更新
dist[k]=dist[u]+G.edge[u][k];//执行更新
path[k]=u;//记录最短路前驱
}
}
}
}Floyd#
允许有负边权,不允许有负回路(否则路径可以在负回路中转圈,每转一圈花费都会变小)。可以得到任意两点之间的最短路。本质是动态规划。根据邻接矩阵,依次选择一个点作为中间点,看一下经过中间节点之后路径和会不会更小一些,如果小则更新最短路径。标路径的方法:都是记录这个点的前驱,生成路径的时候倒着回去找到起点即可
下图是一个例子。其中
- 矩阵表示任意两点之间最短路径长度(左边纵列数字为起点,上方横排数字为终点)
- 矩阵表示“ 对应的最短路径中,终点的前驱点”。-1 表示不存在前驱。例如 的第二行第三列是 ,表示“从2到3的最短路径中,3的前驱是0”
- 是起始状态
- 表示选取点 0 作为中间点后的最短路径长度矩阵, 表示选取点 1 作为中间点后的最短路径长度矩阵,依次类推。
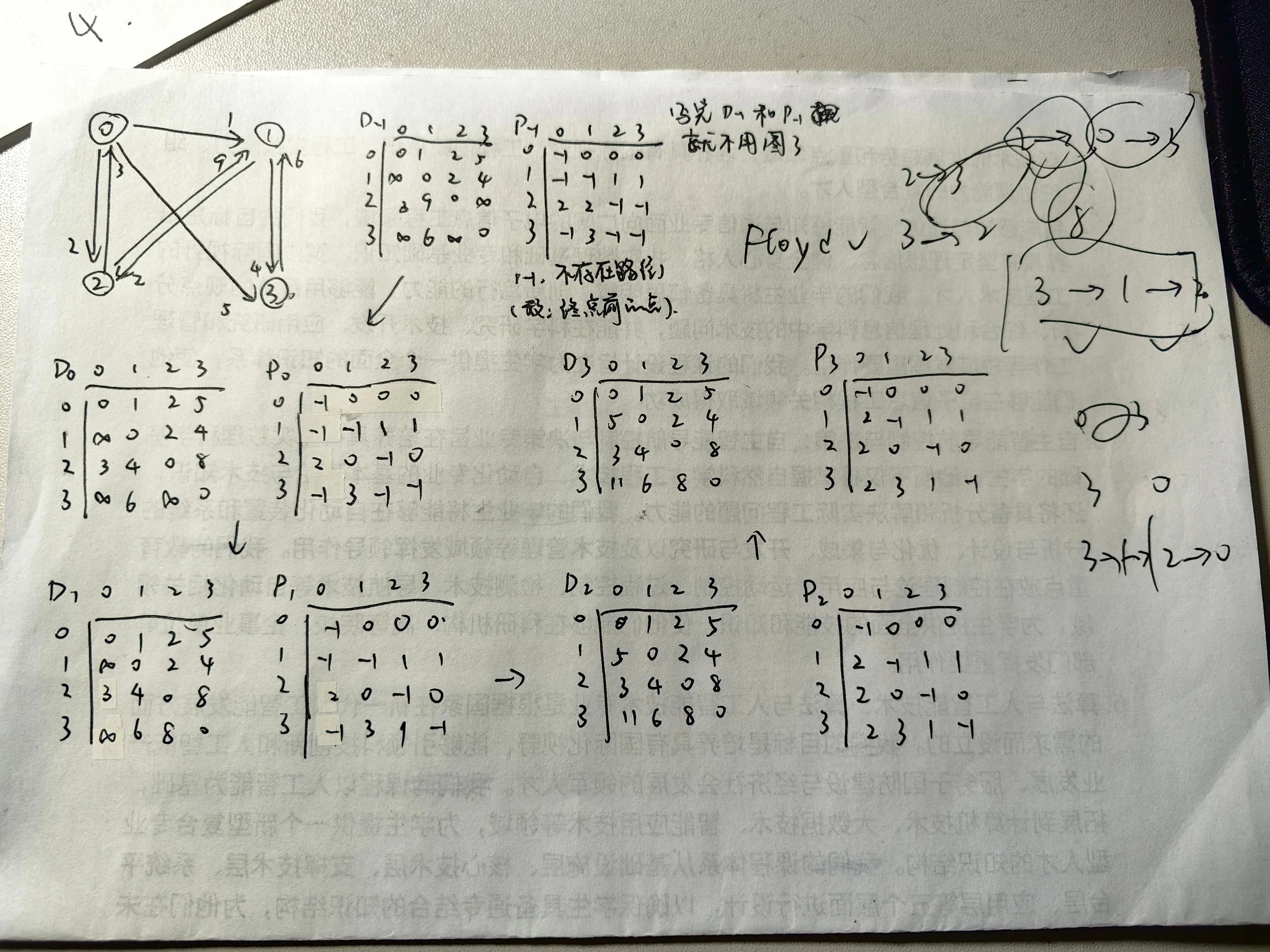
最后得到 和 ,已经蕴含了网络中任意两个节点最短路径的所有信息
例如从 3 走到 0,根据 矩阵,第 3 行第 0 列的值为 11,所以 3 到 0 的最短路径长度为 11。
然后根据 矩阵确定路径。3 到 0 的最短路径上(即 矩阵的第三行),0 的前驱是 2,2 的前驱是 1,1 的前驱是 3(起点)。因此路径是 3 - 1 - 2 - 0。
模板
void floyd(Graph G,int d[][MAXVNUM],int path[][MAXVNUM])
{//d[i][j]是顶点i到j之间的最短路径长度
int n=G.vnum;
for(int i=0;i<n;i++)//初始化
{
for(int j=0;j<n;j++)
{
d[i][j]=G.edge[i][j];//一开始直接复制邻接矩阵,就是图上的D_{-1}
if(i==j) path[i][j]=-1;
else if(d[i][j]<INF) path[i][j]=i;
else path[i][j]=-1;
}
}
for(int k=0;k<n;k++)//选取中间节点k
{
for(int i=0;i<n;i++)
{
for(int j=0;j<n;j++)
{
if(d[i][k]+d[k][j]<d[i][j])
{
d[i][j]=d[i][k]+d[k][j];
path[i][j]=path[k][j];
}
}
}
}
}它是 的
Bellman-Ford#
允许有负边权,允许有负回路(算法能判断出存在负回路)。可以得到单源点到任意点的最短路。基本思路:一开始所有点的路径都是无穷大。对于一趟考察,按照某一个固定的顺序考察所有边,如果引入这条边能够使得路径变小,则引入这条边并更新路径最小值。总共做 趟(因为 n 个点连通只需要 n-1 条边。当然如果中间某一趟下来一次都没有更新,就可以直接结束了),做完后得到的数组就是单源点最短路。标路径:也是记他的前驱
判断负回路的方法:做完之后再做一趟考察,如果这一过程把某个数更新了,说明最短路径还能减,即存在负回路。
它是 的,但是边数一般会很大,是 级别的。所以如果不是有负回路或者负边权,还是回到 Dijkstra 或者 Floyd。